上一篇
Linux CAN驱动,如何高效地实现与控制局域网络通信?
Linux中的CAN驱动程序允许计算机与控制器局域网(Controller Area Network, CAN)设备进行通信。它支持多种硬件接口,用于车辆、工业自动化和其他嵌入式系统。
Linux CAN驱动

深入解析Linux CAN驱动程序
1、CAN简介
控制局域网络
CAN协议特性
CAN总线应用场景
2、CAN子系统架构
CAN子系统组件
CAN设备注册与注销
Rtnetlink操作函数
3、CAN文件结构
Core实现与驱动文件
主要模块与功能
重要数据结构和API
4、CAN设备管理
分配和释放CAN设备
注册和注销CAN设备
Rtnetlink操作函数详解
5、Socket CAN驱动
Socket CAN接口介绍
开发板Socket CAN驱动示例
Socket CAN驱动代码分析
6、FlexCAN驱动
FlexCAN硬件架构
FlexCAN驱动源码分析
FlexCAN初始化与配置
7、常见问题解答
CAN通信故障排除
CAN设备兼容性问题
性能优化建议
小伙伴们,上文介绍了“linux can驱动”的内容,你了解清楚吗?希望对你有所帮助,任何问题可以给我留言,让我们下期再见吧。
本站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本站,有问题联系侵删!
本文链接:https://www.xixizhuji.com/fuzhu/7004.html
相关文章
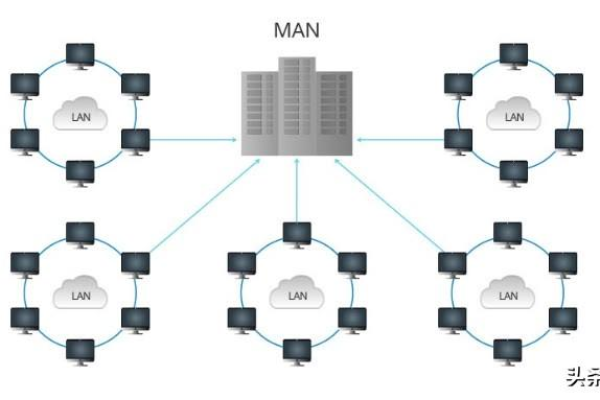
五种主要的网络类型:局域网(LAN)、城域网(MAN)、广域网(WAN)、个域网(PAN)和无线网络)
Android手机轻松访问局域网服务器,快速解决局域网文件共享难题 (android手机访问局域网服务器)

Canvans 似乎是一个拼写错误,可能您想表达的是 Canvas(画布)或 Canva(一个在线设计平台)。鉴于信息的不明确性,我将为两种情况都生成一个原创的疑问句标题。,如果指的是 Canvas(画布),,探索无限可能,画布艺术如何影响现代创作?,如果指的是 Canva(一个在线设计平台),,设计革命者,Canva如何改变我们的视觉沟通方式?
轻松搭建局域网服务:apache2局域网服务器指南 (apache2局域网服务器)
快速传输文件(局域网快速传输文件)(局域网内快速传输文件)「局域网快速传输工具」

procreate怎么复制局部-procreate复制局部教程
电力系统保护与控制_命令与控制
arm linux 驱动,嵌入式linux设备驱动程序开发指南(嵌入式linux设备驱动开发详解)