上一篇
Cozmo机器人是如何实现人脸识别功能的?
Cozmo机器人具备人脸识别功能,通过其视觉系统识别人脸并执行相应动作。
Cozmo机器人是一款由Anki公司开发的智能小型机器人,具备识别人脸、表达情绪和进行游戏互动的能力,其人脸识别功能通过内置的摄像头和先进的计算机视觉技术实现,以下是对Cozmo机器人人脸识别功能的详细解析:

Cozmo机器人的人脸识别功能
Cuzmo机器人的人脸识别功能主要依赖于其内置的摄像头和计算机视觉技术,具体而言,Cuzmo使用Python SDK提供的一系列API接口,这些接口允许开发者访问Cuzmo的硬件资源和功能,包括人脸识别,通过这些API,开发者可以实现对Cuzmo机器人的编程控制,使其能够识别并响应人脸。
1、技术原理
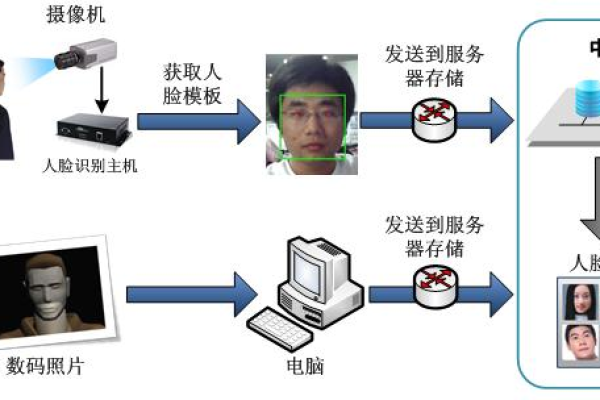
摄像头与传感器:Cuzmo配备了高清摄像头和多种传感器,能够捕捉图像并进行初步处理。
计算机视觉算法:利用卷积神经网络(CNN)等深度学习算法,Cuzmo可以分析和识别图像中的人脸特征。
实时数据处理:Cuzmo能够在获取图像后迅速进行处理,并做出相应的反应,如点亮LED灯或转向人脸方向。
2、应用场景
情感表达:当Cuzmo检测到人脸时,可以通过LED灯、声音和动作表达不同的情感。
互动游戏:在识别到人脸后,Cuzmo可以进行各种互动游戏,增加用户的参与感和娱乐性。
安全监控:在某些应用场景下,Cuzmo可以被用作简单的安全监控设备,识别并跟踪特定人员。
3、开发工具
Python SDK:Cuzmo提供了Python SDK,使开发者能够通过编写Python代码来控制机器人的各种功能,包括人脸识别。
TensorFlow集成:开发者可以利用TensorFlow等机器学习框架,进一步提升Cuzmo的图像识别能力,例如通过训练模型来识别更多的物体和人脸。
4、实际案例
代码示例:以下是一个使用Python SDK实现的简单人脸识别示例代码:
import asyncio
import time
import cozmo
def light_when_face(robot: cozmo.robot.Robot):
robot.move_lift(-3)
robot.set_head_angle(cozmo.robot.MAX_HEAD_ANGLE).wait_for_completed()
face = None
print("Press CTRL-C to quit")
while True:
if face and face.is_visible:
robot.set_all_backpack_lights(cozmo.lights.blue_light)
else:
robot.set_backpack_lights_off()
try:
face = robot.world.wait_for_observed_face(timeout=30)
except asyncio.TimeoutError:
print("Didn't find a face.")
return
time.sleep(.1)
cozmo.run_program(light_when_face, use_viewer=True, force_viewer_on_top=True)该代码演示了如何让Cuzmo在检测到人脸时点亮背部的LED灯。
FAQs
1、如何更新Cuzmo的应用程序?
答:将应用更新到所有设备(Android、iOS和Amazon Fire)上提供的最新版本即可。
2、Cuzmo无法启动怎么办?
答:确保使用最小2A 5V的电源为Cuzmo供电。
小编有话说
Cuzmo机器人的人脸识别功能不仅展示了其在计算机视觉领域的强大能力,还为用户提供了丰富的互动体验,通过Python SDK和TensorFlow等工具,开发者可以进一步扩展Cuzmo的功能,使其在教育、研究和娱乐等多个领域发挥更大的作用,无论是初学者还是有经验的开发者,都可以尝试通过编程来探索Cuzmo的无限可能。
本站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本站,有问题联系侵删!
本文链接:https://www.xixizhuji.com/fuzhu/395653.html