如何DIY一个远程智能监控机器人?

硬件准备
主控模块:如ESP32、Arduino等,负责处理数据和控制其他组件,以ESP32为例,它集成了Wi-Fi模块,可实现无线通信。
摄像头模块:用于采集视频图像,常见的有OV7670等型号,通过连接树莓派或Arduino等主控板,将采集到的图像数据传输到远程服务器或本地存储设备。
传感器模块:包括温度传感器、湿度传感器、红外传感器等,可检测环境参数和人体活动,红外传感器可用于检测是否有人进入监控区域。
电机驱动模块:若机器人需要移动,需配备电机及相应的驱动模块,如L298N电机驱动板,用于控制电机的正反转和转速,实现机器人的移动。
电源模块:为整个系统提供电力支持,根据所选硬件的电压和电流需求,选择合适的电源适配器或电池组。
软件设计与编程
编程语言选择:常用的有Python、C++、Arduino IDE等,Python适合快速开发和数据处理;C++性能更高,适用于复杂的算法和系统级编程;Arduino IDE则简单易用,适合初学者进行硬件控制编程。

网络通信编程:利用套接字编程实现与远程服务器的通信,在主控模块上编写客户端程序,按照指定的协议向服务器发送数据,并接收服务器的指令,使用TCP/IP协议建立可靠的连接,确保数据的准确传输。
图像处理与识别:如果需要对采集到的图像进行分析和识别,可使用OpenCV等计算机视觉库,通过编写算法,实现对特定目标的检测、跟踪和识别,如人脸识别、物体识别等。
控制算法实现:根据传感器数据和远程指令,编写控制算法来控制机器人的行为,根据温度传感器的数据自动调节空调温度;根据红外传感器的信号判断是否有人靠近,并触发相应的报警或动作。
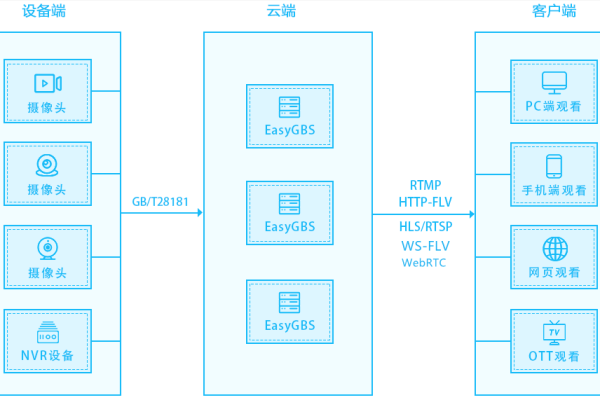
远程监控与控制实现
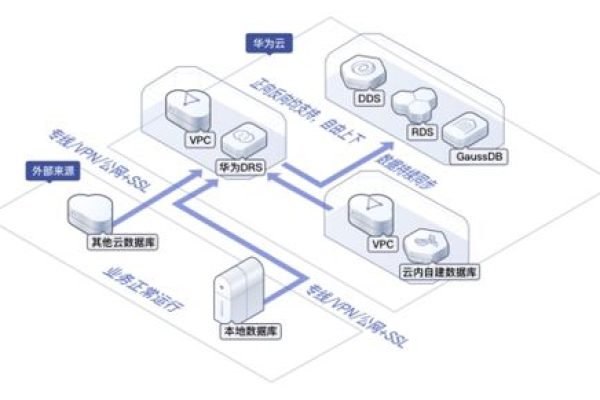
搭建服务器:在远程端搭建服务器,用于接收和处理机器人发送的数据,并向机器人发送控制指令,可以使用云服务器或本地服务器,根据实际需求选择合适的方案,服务器端需要运行相应的服务程序,监听来自机器人的连接请求,并进行数据处理和转发。

开发客户端应用程序:在手机、电脑等终端设备上开发客户端应用程序,用于实时查看机器人传输的图像和数据,并发送控制指令,客户端应用程序可以通过网络与服务器进行通信,获取机器人的状态信息和视频画面,同时向服务器发送用户的操作指令,由服务器转发给机器人执行。
数据安全与加密:为了确保数据传输的安全性,可采用加密技术对数据进行加密处理,使用SSL/TLS协议对网络通信进行加密,防止数据被窃取或改动。
机械结构设计与组装
底盘设计:根据机器人的使用场景和需求,设计合适的底盘结构,可以采用轮式、履带式或腿式等不同的移动方式,轮式底盘结构简单、灵活性高,适用于平坦的地面;履带式底盘则具有更好的越野性能和稳定性,适用于复杂地形;腿式底盘模仿生物的行走方式,具有更高的机动性和适应性。
云台设计:如果需要实现摄像头的全方位监控,可设计一个云台结构,使摄像头能够在水平和垂直方向上自由转动,云台的转动可以通过电机驱动,通过精确的控制算法实现摄像头的定位和跟踪。

外壳设计与组装:设计一个合适的外壳,以保护机器人内部的电子设备和机械结构,外壳应具有良好的散热性能、防水性能和抗冲击性能,将各个硬件模块安装在底盘或外壳上,并进行合理的布线和固定,确保机器人的稳定性和可靠性。
测试与优化
功能测试:在组装完成后,对机器人的各项功能进行全面测试,包括传感器数据采集、电机控制、网络通信、图像采集与传输等,检查机器人是否能够按照预期的工作模式正常运行,及时发现并解决问题。
性能优化:根据测试结果,对机器人的性能进行优化,优化控制算法以提高机器人的响应速度和稳定性;调整传感器的灵敏度和精度,提高数据采集的准确性;优化网络通信协议,减少数据传输的延迟和丢包率等。
用户体验优化:从用户的角度出发,对机器人的操作界面和交互方式进行优化,使客户端应用程序更加简洁、直观、易用,提高用户的使用体验。





热门文章
-
云服务器在搭建实时报警平台中扮演什么角色?
2024-10-04 -

MySQL存储过程的高效使用与编写指南,如何优化C语言中的MySQL存储过程?
2025-03-08 -

为什么服务器在技术世界中如此受到青睐?
2024-10-08 -

配件网站模板_网站模板设置
2024-06-23 -

如何检查网络连接状态以确保设备已连接到互联网?
2025-03-01 -

如何轻松租用云服务器,关键步骤和技巧指南
2024-09-22 -
是否必须购买云数据库以配合云服务器使用?
2024-09-20 -
CFTPSSL证书是什么?它如何提升文件传输的安全性?
2024-12-15