上一篇
空间信息技术基础_命名空间基础配置
空间信息技术基础涉及命名空间的设置,这是组织代码的一种方式,可以避免命名冲突。配置命名空间通常包括声明、使用和嵌套等操作,是编程中管理不同功能模块的重要手段。
关于空间信息技术基础的命名空间基础配置,以下是详细的解释和表格展示:

命名空间基础配置
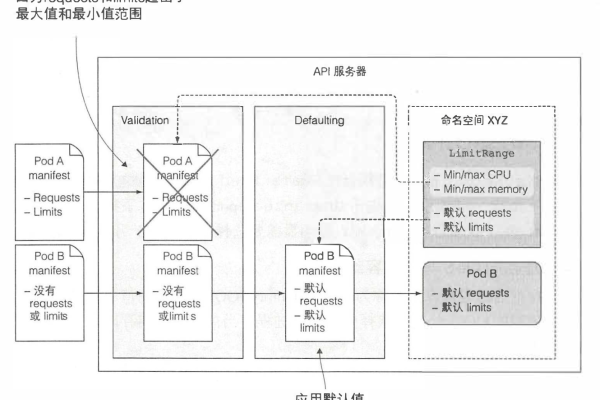
命名空间(Namespace)提供一种机制,将同一集群中的资源划分为相互隔离的组,在同一命名空间内的资源名称要唯一,但跨命名空间时没有这个要求。
命名空间基础配置参数
| 参数名 | 取值范围 | 默认值 | 是否允许修改 | 作用范围 |
| 命名空间名称 | 根据具体集群规则设定 | 用户自定义 | 是 | 同一集群中的资源划分 |
| 命名空间描述 | 任意文本 | 无 | 是 | 命名空间annotation中的描述 |
| 命名空间状态 | 活动、非活动等 | 活动 | 是 | 控制命名空间的可用性 |
命名空间的作用和重要性
1、隔离性:命名空间可以将一个集群的资源划分为不同的组,确保不同项目或不同用户之间的资源隔离。
2、简化管理:通过命名空间可以简化资源的管理,同一命名空间下的资源管理和调度更加便捷。
3、安全性增强:不同命名空间中的资源相互隔离,有助于提高集群的安全性,防止不同用户或项目之间的资源误操作。
4、灵活性提升:允许用户根据需求创建和管理不同的命名空间,提升了系统使用的灵活性。
命名空间在空间信息技术基础配置中起到了至关重要的作用,它不仅提高了资源管理的隔离性和安全性,还简化了日常的管理操作,理解并合理配置命名空间,对于保障集群运作的高效性和安全性具有重要意义。
| 配置项 | 描述 | 示例 |
| 默认命名空间 | ROS中的全局命名空间,默认为根目录 / | / |
| 自定义命名空间 | 为节点指定特定的命名空间,使节点和参数在该命名空间内有效 | my_namespace |
| 节点Handle | 用于创建节点句柄,可在其中指定命名空间 | ros::NodeHandle nh;(全局命名空间) ros::NodeHandle nh("my_namespace");(自定义命名空间) |
| 命名空间属性 | 在launch文件中使用命名空间属性(ns)为节点设置命名空间 | |
| 参数设置 | 在命名空间中设置和获取参数 | nh.setParam("my_namespace/param_key", param_value);(设置参数) nh.getParam("my_namespace/param_key", param_value);(获取参数) |
| 节点间通信 | 在不同命名空间下的节点如何进行通信 | 使用全局命名空间或相对路径进行话题和服务通信,如:nh.advertise<:string>("my_namespace/topic_name", 10); |
| 命名空间操作 | 如何操作和访问不同命名空间下的节点和参数 | 使用ros::Namespace类进行操作,或者直接在NodeHandle中指定命名空间路径 |
这个介绍简要介绍了在空间信息技术基础的ROS(Robot Operating System)中命名空间的基础配置和操作方法,有助于理解和使用ROS中的命名空间功能,在实际应用中,合理的命名空间配置可以方便节点管理和参数共享。
本站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本站,有问题联系侵删!
本文链接:http://www.xixizhuji.com/fuzhu/59382.html