为什么租用服务器的成本如此昂贵?

服务器租用价格之所以显得较高,是由于多种成本因素的累积以及服务提供商需要确保的服务质量,具体分析如下:
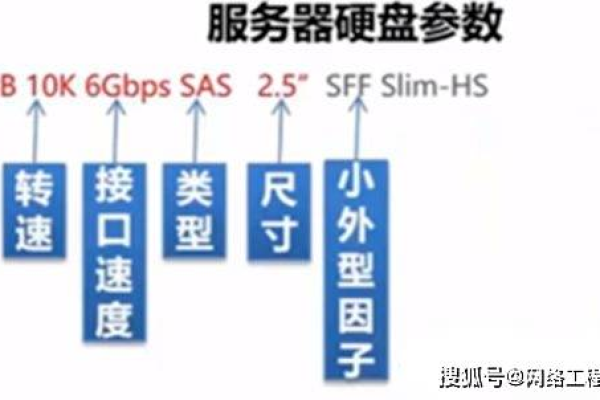
1、硬件成本:
服务器本身需要高性能的硬件组件,如处理器、内存、硬盘等,这些硬件的成本较高。
服务器硬件的购买、维护和更新都需要大量的投资,这些成本会直接反映在租赁价格上。
2、数据中心成本:
数据中心需要投资大量的设备和基础设施,包括电力供应、冷却系统、网络设备等。
数据中心的维护和保护服务器的安全以及提供24小时不间断的运行服务,这些都会增加了租赁成本。
3、网络带宽成本:

服务器的运营需要高速的网络连接,以保证数据的快速传输和访问速度。
网络带宽的价格非常昂贵,尤其是对于需要大量流量和高速传输的应用程序和网站来说。
4、维护成本:
服务器需要定期进行硬件和软件维护,以确保其正常运行和安全性。
服务器还需要进行24/7的监控和技术支持,以及定期的升级和更新,这些都需要专业的人员来进行操作和维护,因此也会增加租用服务器的成本。
5、空间成本:

服务器需要存放在数据中心中,数据中心提供了稳定的电力供应、温度控制和安全防护设施等。
这些设施的租金和运营成本都是需要考虑的因素。
6、技术支持和服务:
供应商需要提供24/7的技术支持和服务,确保服务器的稳定运行和及时解决故障。
7、地域差异:
不同地区的机房,例如偏远地区四川、云南、新疆等机房服务器租用价格偏高一些,浙江,江苏等沿海地区的服务器租用价格比较便宜。

在考虑租用服务器时,以下几点可能对您有所帮助:
了解不同供应商的定价策略,比较价格与服务内容。
考虑服务器的配置需求,避免过度支付不必要的资源。
注意合同条款,避免隐性费用和长期合约的束缚。
租服务器价格之所以高,是因为服务提供商需要在保证服务质量的同时,覆盖硬件、维护、数据中心运营、网络带宽、技术支持和其他相关成本,用户在选择租用服务器时,应充分考虑自身需求和预算,同时关注服务提供商的信誉和服务质量,以确保获得性价比最高的服务。








热门文章
-
云服务器在搭建实时报警平台中扮演什么角色?
2024-10-04 -

MySQL存储过程的高效使用与编写指南,如何优化C语言中的MySQL存储过程?
2025-03-08 -

微信中拉黑某人后,其头像显示状态会有什么变化?
2024-11-12 -

为什么服务器在技术世界中如此受到青睐?
2024-10-08 -

QQ资料卡为何显示为空?原因何在?
2024-11-11 -

配件网站模板_网站模板设置
2024-06-23 -
是否必须购买云数据库以配合云服务器使用?
2024-09-20 -

如何轻松租用云服务器,关键步骤和技巧指南
2024-09-22