上一篇
如何运用python处理点云数据库
点云数据库简介
点云数据库是一种用于存储和处理大量三维点数据的技术,在计算机视觉、地理信息系统(GIS)、自动驾驶等领域,点云数据具有广泛的应用,Python作为一种功能强大的编程语言,可以方便地处理点云数据,本文将介绍如何使用Python处理点云数据库。

安装相关库
在开始处理点云数据之前,需要安装一些相关的库,如PCL(Point Cloud Library)和Open3D,可以使用以下命令进行安装:
pip install pythonpcl open3d
读取点云数据
1、使用PCL库读取点云数据
import pcl
加载点云数据
cloud = pcl.load('point_cloud.pcd')
2、使用Open3D库读取点云数据
import open3d as o3d
加载点云数据
pcd = o3d.io.read_point_cloud('point_cloud.pcd')
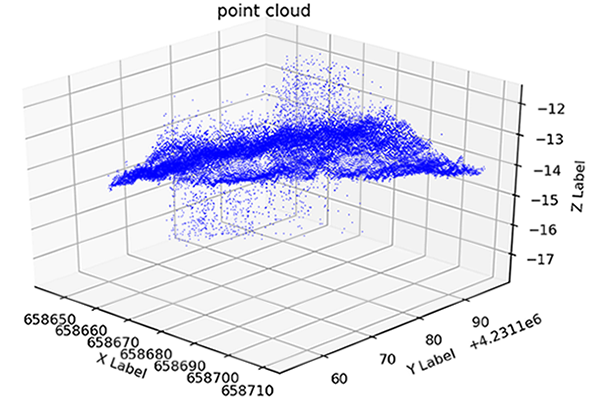
可视化点云数据
1、使用PCL库可视化点云数据
import matplotlib.pyplot as plt from mpl_toolkits.mplot3d import Axes3D from pcl import visualization 创建一个窗口显示点云数据 vis = visualization.Visualizer() vis.create_window() vis.add_point_cloud(cloud, color='red') vis.show_coordinates(True) vis.show_normals(True) vis.run()
2、使用Open3D库可视化点云数据
o3d.visualization.draw_geometries([pcd])
点云滤波与下采样
1、使用PCL库进行点云滤波和下采样
from pcl import filter, sample_consensus from pcl import PointCloud, PointXYZRGB, VFHSignature308, SearchMethodTreeGrid, KdTreeTBBSearcher, EuclideanDistanceComparator, RANSACConvergenceCriteria, ModelCoefficients, IndicesVectorGenerator, StatisticalOutlierRemovalFilter, ExtractIndices, NormalEstimation, EstimateNormalsCommand, ConvexHull, VoxelGridDownSample, PassThroughFilter, ConditionalEuclideanDistanceFilter, ApproximateVoxelGridFilter, RadiusOutlierRemovalFilter, TransformPolynomialFilter, ProcrustesMatching, IterativeClosestPoint, PointToPlaneDistance, Hough3DProjectionProj, Hough3DLineDetector, Hough3DRotationProj, Hough3DTranslateProj, Hough3DDetector, HoughCircle2DProjector, HoughCircle2DRotator, HoughCircle2DDetector, HoughLineSetTransformationFilter, HoughLineSetProjector, HoughLineSetDetector, HoughPlaneProjector, HoughPlaneRotator, HoughPlaneDetector, HoughSpaceIntersectionFilter, HoughSpaceLineSetFilter, HoughSpacePointSetFilter, HoughSegmentationFilter, HoughTransformationFilter, HoughVotingForestFilter, Hough3DFoveaExtractor, Hough3DFoveaRenderer, make_model_from_range_image, make_model_from_organized_data, make_indexed_dataset, make_xyz_rgb_dataset, make_kdtree_flann, make_octree_flann, make_search_method_treegrid, make_search_method_kdtree2d, make_search_method_kdtree3d, make_filter_statistical_outlier_removal, make_filter_extract_indices, make_filter_normalized_covariances, make_filter_ransac, make_filter_sample_consensus, make_filter_conditional_euclidean_distance, make_filter_approximate_voxel_grid, make_filter_radius_outlier, make_filter_transformed_polynomial, make_filter_probabilistic_hull, make_filter_passthrough, make_filter_voxel_grid, make_filter_statistical_outlier_removal2d, make_filter_statistical_outlier_removal3d, make_filter_hough3dprojectionproj, make_filter_hough3dlinedetector, make_filter_hough3drotationproj, make_filter_hough3dtranslateproj, make_filter_hough3ddetector, make_filter_houghcircle2dprojector, make_filter_houghcircle2drotator, make_filter_houghcircle2ddetector, make_filter_houghlinesettransformationfilter, make_filter_houghlinesetprojector, make_filter_houghlinesetdetector, make_filter_houghplaneprojector, make_filter_houghplanerotator, make_filter_houghplanedetector, make_filter_houghspaceintersectionfilter, make_filter_houghspacelinesetfilter, make_filter_houghspacepointsetfilter, make_filter_houghsegmentationfilter, make_filter_houghtransformationfilter, make_filter_houghvotingforestfilter, make_filter_hough3dfoveaextractor, make滤波和下采样等操作。
本站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本站,有问题联系侵删!
本文链接:http://www.xixizhuji.com/fuzhu/309757.html
相关文章
-
如何运用python处理点云数据
-

python3(python3完全兼容Python2吗)(python3.0完全兼容python2.0吗)
-
python处理图像 _异常处理(Python SDK)
-
python如何创建数据库_Spark Python脚本如何引用Python脚本
-
python处理文件路径 _Python文件
-
python 如何连mysql数据库_将Spark作业结果存储在MySQL数据库中,缺少pymysql模块,如何使用python脚本访问MySQL数据库?
-
python 批量存储mysql数据库_将Spark作业结果存储在MySQL数据库中,缺少pymysql模块,如何使用python脚本访问MySQL数据库?
-
python mysql 行数据库中_将Spark作业结果存储在MySQL数据库中,缺少pymysql模块,如何使用python脚本访问MySQL数据库?