上一篇
如何运用python处理点云数据
点云数据是三维空间中点的集合,通常用于表示物体的表面形状,在Python中,我们可以使用一些库来处理点云数据,例如open3d、pcd_tools等,本文将详细介绍如何使用Python处理点云数据。

1、安装相关库
我们需要安装一些处理点云数据的库,在命令行中输入以下命令进行安装:
pip install open3d pip install pcd_tools
2、读取点云数据
我们可以使用open3d库中的PointCloud类来读取点云数据,以下是一个简单的示例:
import open3d as o3d
读取点云数据
pcd = o3d.io.read_point_cloud("path/to/your/point_cloud_file.ply")
"path/to/your/point_cloud_file.ply"是你的点云文件的路径,你可以根据需要替换为其他格式的点云文件,例如.pcd、.xyz等。
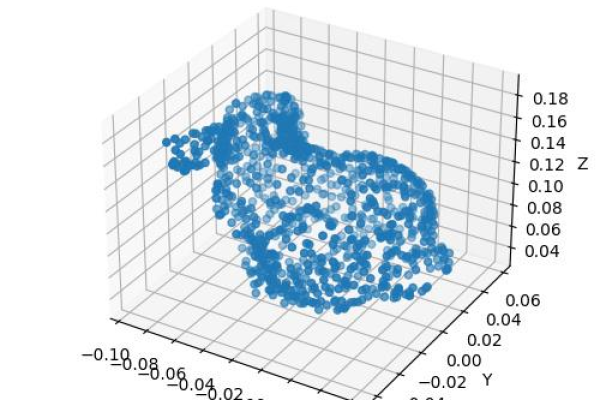
3、可视化点云数据
我们可以使用open3d库中的可视化功能来查看点云数据,以下是一个简单的示例:
可视化点云数据 o3d.visualization.draw_geometries([pcd])
运行上述代码后,你将看到一个窗口显示点云数据,你可以使用鼠标旋转、缩放和平移视图来查看点云数据。
4、滤波点云数据
我们可以使用open3d库中的滤波器对点云数据进行滤波处理,以下是一个简单的示例:
定义滤波器类型和参数 voxel_size = 0.05 # 体素大小,单位为米 leaf_size = 32 # 叶子节点大小,即每个八叉树节点包含的体素数量 downsample_factor = 16 # 下采样因子,即每个体素内的点数 应用滤波器 filtered_pcd = pcd.voxel_down_sample(voxel_size) # 体素下采样滤波器 filtered_pcd = filtered_pcd.voxel_grid_down_sample(leaf_size) # 八叉树下采样滤波器 filtered_pcd = filtered_pcd.random_down_sample(downsample_factor) # 随机下采样滤波器
5、分割点云数据
我们可以使用open3d库中的分割算法对点云数据进行分割,以下是一个简单的示例:
定义分割算法类型和参数 ransac_num_iterations = 1000 # RANSAC迭代次数 distance_threshold = 0.01 # 距离阈值,用于判断两个点是否属于同一对象表面的一部分 max_correspondence_distance = 0.02 # 最大对应距离,用于判断两个点的对应关系是否有效 estimator = o3d.pipelines.registration.TransformationEstimatorPointToPlane() # 平面估计器,用于计算平面法向量和截距 ransac_result = pcd.segment_plane(distance_threshold, ransac_num_iterations, max_correspondence_distance, estimator) # 执行RANSAC分割算法
6、保存处理后的点云数据
我们可以使用open3d库中的写入功能将处理后的点云数据保存到文件中,以下是一个简单的示例:
保存处理后的点云数据
o3d.io.write_point_cloud("path/to/your/processed_point_cloud_file.ply", filtered_pcd)
"path/to/your/processed_point_cloud_file.ply"是你希望保存处理后点云文件的路径,你可以根据需要替换为其他格式的点云文件,例如.pcd、.xyz等。
本站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本站,有问题联系侵删!
本文链接:http://www.xixizhuji.com/fuzhu/309741.html