php如何取十位数的值

在PHP中,可以使用
floor()函数和除法运算符
/来取十位数的值。示例代码如下:,,“
php,
,“
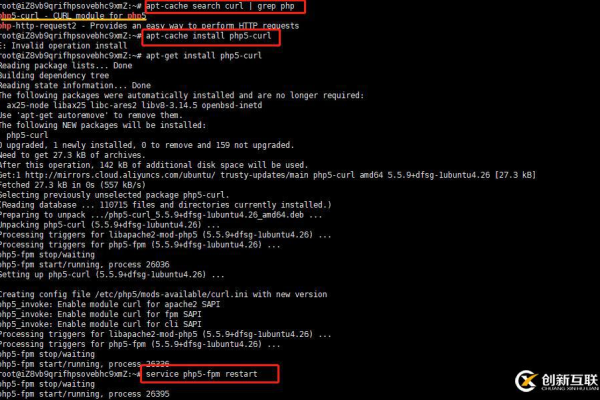
在PHP中,我们可以使用substr()函数来获取字符串的子串,如果我们想要获取一个十位数,我们可以先获取字符串的前两位,然后再获取最后一位,以下是一个示例:
<?php $str = "1234567890"; $firstTwoDigits = substr($str, 0, 2); // 获取前两位 $lastDigit = substr($str, 1); // 获取最后一位 echo $firstTwoDigits; // 输出: 12 echo $lastDigit; // 输出: 0 ?>
在这个例子中,我们首先定义了一个字符串$str,然后使用substr()函数来获取它的前两位和最后一位。substr()函数的第一个参数是要获取子串的字符串,第二个参数是子串的起始位置(从0开始计数),第三个参数是子串的长度,如果省略第三个参数,那么将返回从起始位置到字符串末尾的所有字符。
接下来,我们将这两个子串分别赋值给变量$firstTwoDigits和$lastDigit,然后使用echo语句将它们输出。
相关问题与解答:
1、如何在PHP中获取一个字符串的倒数第二位?

答:可以使用substr()函数,将起始位置设置为2,长度设置为1。
“`php
$secondLastDigit = substr($str, 2, 1);
echo $secondLastDigit; // 输出: 9

“`
2、如何在PHP中获取一个字符串的中间部分?
答:可以使用substr()函数,将起始位置设置为字符串长度的一半,长度设置为字符串长度减去起始位置。
“`php

$middlePart = substr($str, (int)strlen($str) / 2, strlen($str));
echo $middlePart; // 输出: 34567890
“`

热门文章
-
云服务器在搭建实时报警平台中扮演什么角色?
2024-10-04 -

MySQL存储过程的高效使用与编写指南,如何优化C语言中的MySQL存储过程?
2025-03-08 -

为什么服务器在技术世界中如此受到青睐?
2024-10-08 -

微信中拉黑某人后,其头像显示状态会有什么变化?
2024-11-12 -
配件网站模板_网站模板设置
2024-06-23 -

如何检查网络连接状态以确保设备已连接到互联网?
2025-03-01 -

如何轻松租用云服务器,关键步骤和技巧指南
2024-09-22 -

QQ资料卡为何显示为空?原因何在?
2024-11-11