租用香港云服务器有什么优势?

香港云服务器的优势
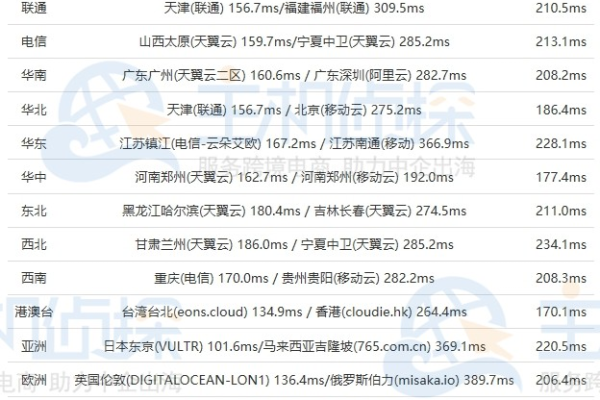
1、高速稳定的网络环境
香港作为全球互联网的重要枢纽,拥有世界级的网络基础设施,香港云服务器采用的网络连接速度非常快,且稳定性高,这使得用户在使用过程中可以享受到流畅的网络体验,无论是用于网站搭建、在线游戏还是大数据分析等场景,都能满足用户的需求。
2、优质的数据中心服务
香港云服务器租用通常会选择在位于香港的数据中心进行部署,这些数据中心通常具有以下优势:先进的硬件设备、高效的能源管理、严格的安全措施以及完善的技术支持,这些优势保证了用户数据的安全和可靠性,同时也提高了服务器的运行效率。
3、弹性扩展能力
香港云服务器租用可以根据用户的实际需求进行弹性扩展,当用户业务量增加时,可以快速升级服务器配置,以满足更高的性能要求,而在业务量减少时,也可以根据需要降低配置,节省成本,这种弹性扩展能力使得用户可以在不断变化的市场环境中保持竞争力。
4、便捷的管理方式
香港云服务器租用通常提供简单易用的管理工具,帮助用户轻松管理服务器,用户可以通过控制台实现对服务器的实时监控、故障排查、软件更新等功能,许多云服务商还提供了丰富的API接口,方便用户进行二次开发和定制。
相关问题与解答
1、如何选择合适的香港云服务器?
答:选择合适的香港云服务器需要考虑以下几个方面:首先是根据自己的业务需求确定服务器的配置,包括CPU、内存、硬盘等;其次是考虑服务器的性能和稳定性,选择有良好口碑和丰富经验的云服务商;最后是价格因素,合理比较不同服务商的价格和服务内容,选择性价比最高的方案。
2、香港云服务器的安全性如何?
答:香港云服务器的安全性主要取决于云服务商的安全策略和数据中心的物理安全措施,知名的云服务商会对服务器进行加密保护,防止数据泄露,数据中心也会采取严格的门禁控制、视频监控等措施确保数据中心的安全,但用户仍需注意保护好自己的账号密码等信息,避免因自身原因导致数据泄露。
3、香港云服务器的备份和恢复策略是怎样的?
答:香港云服务器的备份和恢复策略主要包括定期备份、异地备份以及灾备方案,定期备份可以确保数据的安全性,一旦发生意外情况,可以迅速恢复数据;异地备份则可以在数据中心出现问题时,及时将数据迁移到其他地方,保证业务的正常运行;灾备方案则是在面临重大灾害时,确保业务能够迅速恢复正常运行,具体实施策略需要根据用户的实际情况进行调整。
4、香港云服务器租用需要了解哪些法律法规?
答:在香港租用云服务器时,用户需要了解以下几个方面的法律法规:首先是数据保护法规,如《中华人民共和国网络安全法》等;其次是知识产权法规,如《中华人民共和国著作权法》等;最后是税收法规,如香港特别行政区政府对于虚拟资产征收的税费等,了解这些法律法规有助于用户合法合规地使用香港云服务器。






热门文章
-
云服务器在搭建实时报警平台中扮演什么角色?
2024-10-04 -

MySQL存储过程的高效使用与编写指南,如何优化C语言中的MySQL存储过程?
2025-03-08 -

为什么服务器在技术世界中如此受到青睐?
2024-10-08 -

微信中拉黑某人后,其头像显示状态会有什么变化?
2024-11-12 -
配件网站模板_网站模板设置
2024-06-23 -

如何检查网络连接状态以确保设备已连接到互联网?
2025-03-01 -

如何轻松租用云服务器,关键步骤和技巧指南
2024-09-22 -

QQ资料卡为何显示为空?原因何在?
2024-11-11