上一篇
探索Pixhawk开源固件,它是如何改变无人机飞行控制的?
Pixhawk是一个开源的飞行控制器,其源码可以在GitHub上找到。
Pixhawk是一款开源的自动驾驶仪,其源代码托管在GitHub上,以下是一些关于Pixhawk源码的详细信息:
1、项目地址:https://github.com/PX4/PX4Autopilot
2、主要编程语言:C++
3、支持的平台:Linux, MacOS, Windows
4、硬件支持:多种无人机和地面站硬件平台
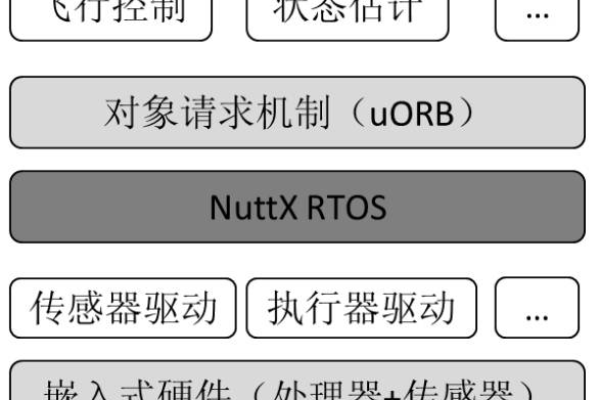
5、功能模块:飞行控制、导航、传感器数据处理、通信等
6、社区活跃:拥有庞大的开发者社区,持续更新和维护
要查看Pixhawk的源代码,你可以访问上述GitHub仓库,然后克隆或下载代码到本地进行查看,以下是克隆仓库的命令:
git clone https://github.com/PX4/PX4Autopilot.git
在克隆完成后,你可以使用你喜欢的代码编辑器打开项目文件夹,开始阅读和分析源代码。
各位小伙伴们,我刚刚为大家分享了有关pixhawk源码的知识,希望对你们有所帮助。如果您还有其他相关问题需要解决,欢迎随时提出哦!
本站发布或转载的文章及图片均来自网络,其原创性以及文中表达的观点和判断不代表本站,有问题联系侵删!
本文链接:https://www.xixizhuji.com/fuzhu/20665.html