如何有效管理消息服务中的主题,并查询特定主题的消息数量?

python,import boto3,,# 创建SNS客户端,sns_client = boto3.client('sns'),,# 指定要查询的主题名称,topic_name = 'your-topic-name',,# 使用get_topic_attributes方法获取主题属性,包括消息数,response = sns_client.get_topic_attributes(TopicArn=topic_name),,# 从响应中提取消息数,message_count = response['Attributes']['MessagesReceived'],,print("消息数:", message_count),`
,,请确保在使用上述代码之前,已经安装了boto3`库,并且配置了正确的AWS访问权限和凭据。
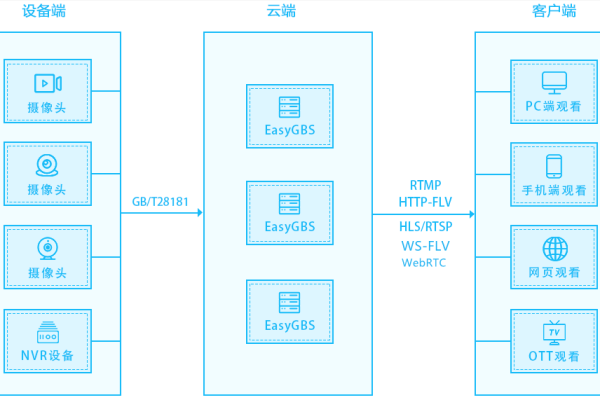
在消息服务中,主题(Topic)是用于分类和组织消息的核心概念,通过主题,可以将相关的消息分组,以便进行更有效的管理和处理,本文将详细介绍如何操作消息服务的主题,并查询主题的消息数。
创建主题
1、登录消息服务控制台:需要登录到您所使用的消息服务的控制台,如阿里云、腾讯云等。
2、选择主题管理:在控制台中,找到“主题管理”或类似的选项。
3、创建新主题:点击“创建主题”按钮,进入创建主题页面。
4、填写主题信息:在创建主题页面,填写主题名称、主题描述等信息,主题名称应简洁明了,易于理解。
5、提交创建:确认无误后,提交创建,系统会为您生成一个唯一的主题ID。
发送消息到主题
1、选择主题:在发送消息时,需要选择相应的主题,这可以通过主题ID或主题名称实现。
2、编写消息内容:根据需求,编写要发送的消息内容,消息内容可以是文本、JSON、XML等格式。
3、设置消息属性:可以为消息设置一些属性,如消息优先级、消息标签等,以便后续筛选和处理。
4、发送消息:确认无误后,发送消息到指定的主题。
查询主题的消息数
1、登录消息服务控制台:同样,需要先登录到消息服务的控制台。
2、选择主题管理:在控制台中,找到“主题管理”选项。
3、查看主题详情:在主题列表中,找到要查询的主题,点击查看详情。
4、查看消息数:在主题详情页面,可以看到该主题的消息数统计信息,这通常包括已发布的消息数、未消费的消息数等。
相关问题与解答
1、问题一:如何删除不再使用的主题?
答:删除不再使用的主题,可以按照以下步骤操作:
登录消息服务控制台。
选择“主题管理”。
在主题列表中,找到要删除的主题。
点击“删除”按钮,确认无误后删除,注意,删除主题后,该主题下的所有消息将被清除,请谨慎操作。
2、问题二:如何批量导出主题的消息记录?
答:批量导出主题的消息记录,可以按照以下步骤操作:
登录消息服务控制台。
选择“主题管理”。
在主题列表中,找到要导出消息记录的主题。
点击“导出消息记录”按钮,选择导出的时间范围、文件格式等参数。
确认无误后,提交导出申请,系统会将导出的文件发送到您的邮箱或指定位置,导出操作可能需要一定的时间,具体取决于消息记录的数量和大小。
各位小伙伴们,我刚刚为大家分享了有关“消息服务的主题如何操作_查询主题的消息数”的知识,希望对你们有所帮助。如果您还有其他相关问题需要解决,欢迎随时提出哦!
热门文章
-
云服务器在搭建实时报警平台中扮演什么角色?
2024-10-04 -

MySQL存储过程的高效使用与编写指南,如何优化C语言中的MySQL存储过程?
2025-03-08 -

为什么服务器在技术世界中如此受到青睐?
2024-10-08 -

微信中拉黑某人后,其头像显示状态会有什么变化?
2024-11-12 -
配件网站模板_网站模板设置
2024-06-23 -

如何检查网络连接状态以确保设备已连接到互联网?
2025-03-01 -

如何轻松租用云服务器,关键步骤和技巧指南
2024-09-22 -

QQ资料卡为何显示为空?原因何在?
2024-11-11